Powered by MongoDB Mobile, MongoDB Stitch, and AWS Kinesis, the MongoDB rover debuted at AWS re:Invent. More than a thousand people stopped by our demo to see if they could navigate the rover around a treacherous alien landscape.
One of the challenges in controlling a rover on the other side of the Solar System is that there will frequently be times when you lose connectivity. To solve that, we store all of the commands in MongoDB Atlas and sync them to the rover (in its local MongoDB Mobile database) whenever it’s contactable.
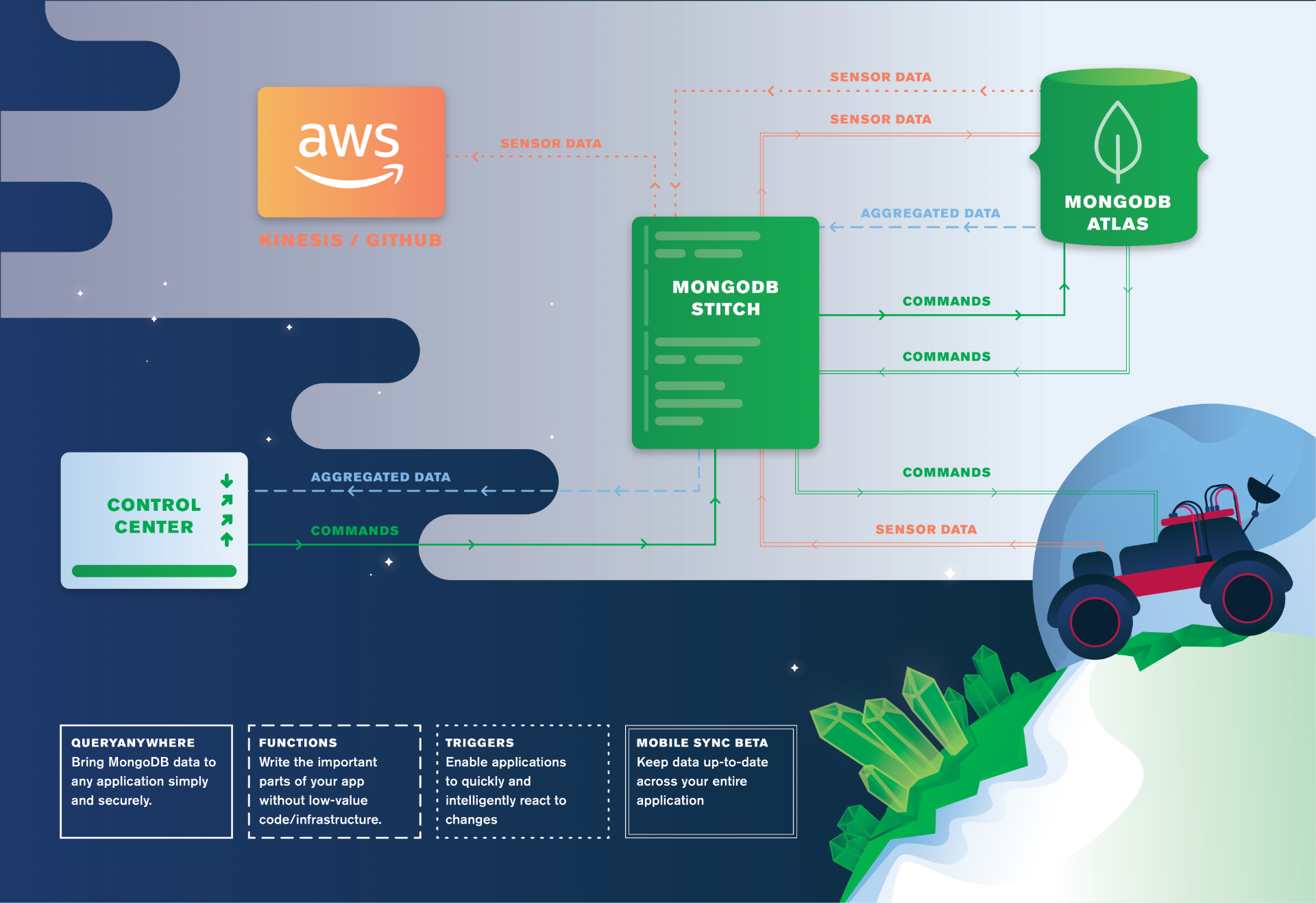
Visitors controlled the rover via a JavaScript web app, which uses Stitch QueryAnywhere to write commands for the rover directly to a collection in MongoDB Atlas (the fully managed hosted MongoDB database, in this case, running in the AWS cloud).
After the commands are sent to the cloud, Stitch Mobile Sync takes over, ensuring all commands are automatically written to the MongoDB Mobile database embedded on the rover (running Android Things on a Raspberry Pi 3b) by Stitch Mobile Sync. The Java app on the rover then acts on the synced commands (moving the Rover), before removing them from the mobile database to reflect that it’s completed with that set of commands – with the updated status then finally synced back to Atlas by Stitch Mobile Sync.
The rover can also record environmental sensor data in MongoDB Mobile, which Stitch Mobile Sync syncs to the sensors collection in Atlas. A Stitch Trigger on the sensors collection then runs a Stitch Function to push those sensor readings to AWS Kinesis for further analysis, such as anomaly detection.
The first appearance of the MongoDB rover coincided with the Mars landing of InSight. We even had our own 7 minutes of terror when the event WiFi buckled under the pressure of thousands of delegates descending on the expo hall during Monday’s evening social – but it did at least demonstrate that Stitch Mobile Sync quickly catches up once connectivity is restored.
This post is the first in a series delving into the components of this interactive demo, and if you can’t wait for more details, then you can find all of the code in GitHub.